A state space/graph search strategy in which a depth-limited version of depth-first search is run repeatedly with increasing depth limits until the goal is found.
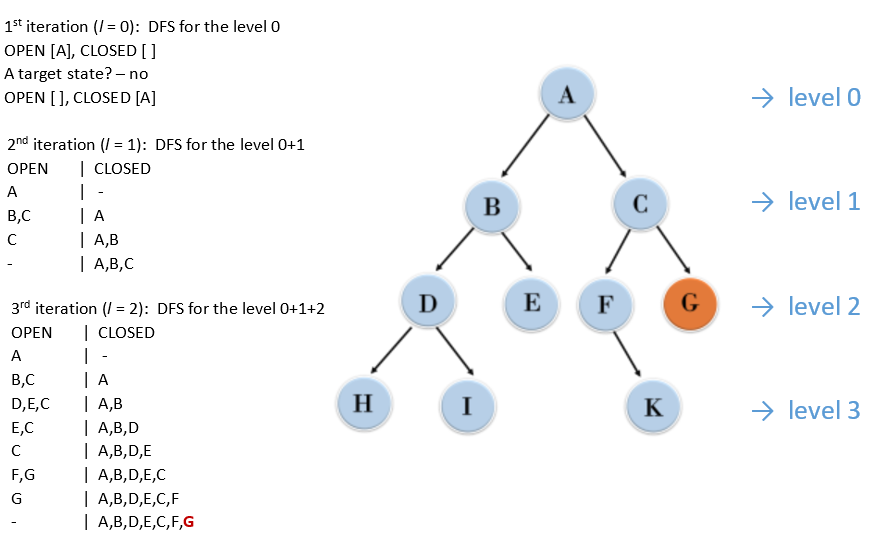
An example: Order in which the nodes are expanded
Properties:
- Completeness: yes, for finite b
- Optimality (Admissibility): yes, for equivalent cost steps
- Time Complexity: O(bd)
- Space Complexity: O(bd), b – branching factor, d – depth